ROBOTIS-OP3의 소스코드는 오픈소스로 깃허브(GitHub)에 공개되어 있다.
ROBOTIS-GIT/ROBOTIS-OP3
ROS packages for the ROBOTIS OP3. Contribute to ROBOTIS-GIT/ROBOTIS-OP3 development by creating an account on GitHub.
github.com
그렇지만 이 소스코드를 살펴보고, 공부할 때
깃허브에서 코드를 열어보는 것은 불편하기 때문에
비주얼 스튜디오나 이클립스 같은 통합개발환경(IDE)을 설치해서 코드를 열어보는 것이 좋다.
ROS를 위한 개발환경으로 많이 사용되는 것은 Qt Creator(plug in for ROS) 이다.
ROS 개발환경인 Qt_creator를 설치하고,
Qt_creator 에서 ROBOTIS-OP3 로봇의 소스코드를 열어보자.
※ 사전 준비 사항 : ROS가 설치되어 있어야 함
1. qt_creator 설치
아래 설치 링크에 들어간다.
ros-qtc-plugin.readthedocs.io/en/latest/_source/How-to-Install-Users.html
How to Install (Users) — ROS Qt Creator Plug-in documentation
This wiki explains the procedure for installing the ROS Qt Creator Plug-in. Note If you primarily want to use this tool for development of other ROS packages (ie: not to work on the plugin itself), please follow the following instructions.
ros-qtc-plugin.readthedocs.io
링크에 들어가면 다음과 같이 설치파일을 받을 수 있다.
자신의 우분투 버전에 맞게 설치 파일을 받는다.
이때 자신의 우분투가 16.04 버전이라면 Xenial Online Installer (Recommended) 를 받아야 한다.

2022.12.22
현재 위 링크에서 Online 또는 Offline Installer를 다운로드 하려고 하면 다운로드가 되지 않는다.
이전에 받아두었던 18.04 Melodic의 Offline Installer 실행파일을 첨부한다.
https://www.dropbox.com/s/11561s3t9r52xgi/qtcreator-ros-bionic-latest-offline-installer.run?dl=0
파일 다운로드가 끝나면
먼저 파일 탐색기를 연다.
파일 탐색기에서 Downloads에 들어간다.
왼쪽 사진과 같은 파일이 다운로드 되어 있을 것이다.
이 파일을 우클릭해서 가장 아래쪽에 있는 properties 에 들어간다.
properties 창이 열리면
permissions 탭에서
왼쪽 사진과 같이
Read and write로 설정해주고
Allow executing files as program에 체크(V)해준다.
위 설정을 마쳤다면 X를 눌러서 properties 창을 닫고
아이콘을 더블클릭해서 파일을 실행해준다.
아래와 같은 창이 뜰 것이다. Next를 눌러서 계속진행한다.

설치 경로를 지정하는 단계가 나오는데,
손대지 않고 Next를 눌러서 그대로 진행하면 된다.

다음으로 Qt Creator(4.9.2)를 체크해준다.
Qt Creator에서 ROS 개발을 할 수 있도록 해주는 플러그인이다.

라이센스 동의를 해준다.
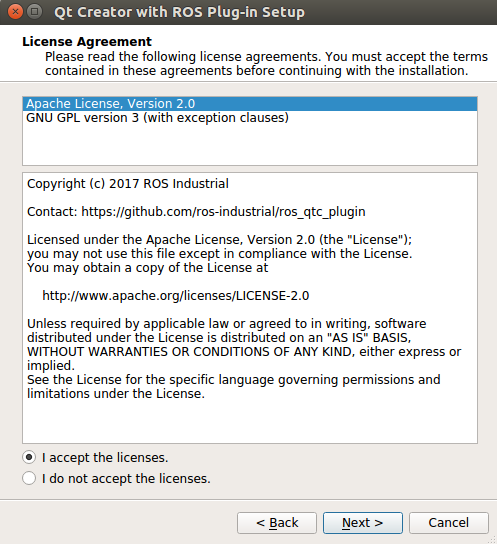
마지막으로 Install 을 눌러서 Qt Creator를 설치한다.

설치가 완료 되었다면 우분투 검색창에서 아래와 같이 qt_creatorf를 검색해서 실행해준다.


Qt Creator가 아래와 같이 열릴 것이다.

2. 새 프로젝트 만들기
새 프로젝트를 생성해보자.

New Project 를 누른다.
Other Project -> ROS Workspace 를 선택하고 choose 를 눌러 진행한다.

프로젝트 Name을 자유롭게 정해준다.
Build System은 CatkinMake 로 해준다.
(만약 catkin_make 가 아닌 catkin build로 빌드한다면 Build System은 CatkinTools로 해준다. )
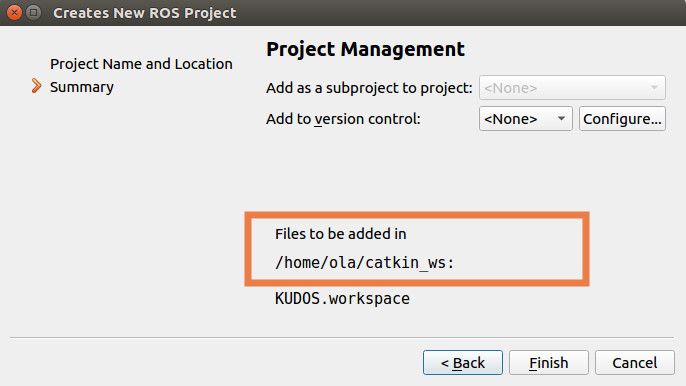
Workspace Path는 Browse...버튼을 눌러서 home에서 catkin_ws폴더로 선택해준다. (중요)

경로가 /home/<우분투사용자이름>/catkin_ws 으로 잘 설정되었는지 확인하고 finish를 눌러서 마친다.
앞으로 catkin_ws 경로에 파일이 추가되면 Qt Creator에서 자동으로 인식해서 프로젝트에 추가될 것이다.
3. ROBOTIS - OP3 패키지 받기
먼저 git을 설치해주어야 한다.
git clone을 이용해서 github에 있는 ROBOTIS-OP3 패키지들을 내려받기 위해서이다.
( 만약 git이 이미 설치되어 있다면 건너뛰고 다음으로 넘어가면 된다. )
터미널을 열어서( ctrl + alt + t ) 아래 명령을 복붙해서 입력해준다.
sudo apt install git
이제 git clone을 이용해서 오픈소스 패키지들을 내려받자.
터미널에서 아래 명령들을 한 줄 씩 복붙해서 입력해준다.
아마 catkin_ws폴더 안에 src 폴더가 있겠지만
만약 catkin_ws 폴더 안에 src폴더가 없다면 src 폴더를 먼저 생성해주어야 한다.
(catkin_ws폴더에 들어가서 빈 공간에서 우클릭하고 New Folder를 누르면 새 폴더를 생성할 수 있다.)
cd ~/catkin_ws/src
git clone https://github.com/ROBOTIS-GIT/DynamixelSDK.git
git clone https://github.com/ROBOTIS-GIT/ROBOTIS-Framework.git
git clone https://github.com/ROBOTIS-GIT/ROBOTIS-Framework-msgs.git
git clone https://github.com/ROBOTIS-GIT/ROBOTIS-Math.git
git clone https://github.com/ROBOTIS-GIT/ROBOTIS-OP3.git
git clone https://github.com/ROBOTIS-GIT/ROBOTIS-OP3-Demo.git
git clone https://github.com/ROBOTIS-GIT/ROBOTIS-OP3-msgs.git
git clone https://github.com/ROBOTIS-GIT/ROBOTIS-OP3-Tools.git
git clone https://github.com/ROBOTIS-GIT/ROBOTIS-OP3-Common.git
git clone https://github.com/ROBOTIS-GIT/ROBOTIS-Utility.git
실제 로봇에서는 이 패키지들을 내려 받기 전에 사전적으로 설치해야하는 각종 의존성 패키지들이 있지만
OP3 코드를 공부하기 위해서는 위 패키지들만 받아서 보면 된다.
물론 이 패키지들을 빌드하거나 실행하려고 하면 에러가 뜰 것이다.
위 패키지들을 받아서 OP3 로봇의 코드를 읽어보고, 공부하는데 사용하면 될 것이다.
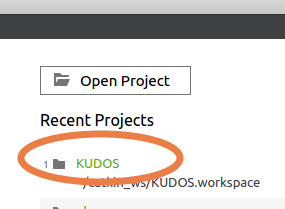
이제 Qt Creator를 열고
아까 만들었던 프로젝트를 열어보자.
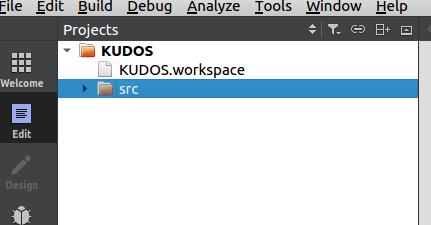
프로젝트에서
src를 열어보면 위에서 내려받은 ROBOTIS-OP3 패키지들을 볼 수 있을 것이다.
'kubot3 > op3 패키지' 카테고리의 다른 글
| Robotis Op3 installation (0) | 2021.06.04 |
|---|